Hey, I’m Mihir!
Currently, a graduate student in the Robotics program of the GRASP Lab at Penn. An aspiring Roboticist, I am particularly excited about the potential impact of Robotics and Artificial Intelligence together in significantly improving the quality of our daily lives and I look forward to solve some of the most challenging problems in this area. My interests lie in the fields of planning, learning, vision and perception for Robotic systems.
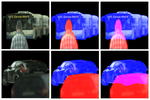
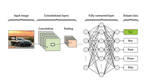
Recently, under the guidance of Prof. Michael Posa, I have been working on leveraging the powerful inductive bias of Deep Learning to solve the challenging nature of frictional contacts. During my time at Penn so far, I have also worked on developing a full autonomy stack for F110 autonomous race cars and designing deep learning architectures for mainstream computer vision tasks such as classification, detection, tracking and segmentation.
Previously, I completed my Bachelor’s in Mechanical Engineering from National Institute of Technology Karnataka, Surathkal where I worked on motion-planning for multi-agent quadcopter systems and probabilistic robotic frameworks like Kalman Filters and SLAM. I have spent time as a Research Intern in the Robotics Lab at IIT Madras, advised by Prof. T. Asokan.
Always open to talk about anything related to Robotics, Soccer, Space Exploration and anything that requires out-of-the-box thinking!
🤖 🚀 ⚽ 🏕️ 🎮
Interests
- Robotics
- Computer Vision
- Deep Learning
Education
-
MSE Robotics, 2021
University of Pennsylvania
-
B.Tech in Mechanical Engineering, 2019
National Institute of Technology Karnataka, Surathkal